CIP-2021 : B63C 11/00 : Equipo para permanecer o trabajar bajo el agua; Medios para buscar objetos sumergidos (composiciones químicas para utilizarlas en aparatos de respiración A62D 9/00;
accesorios o equipos para la natación A63B 31/00 - A63B 35/00; submarinos B63G 8/00).
CIP-2021 › B › B63 › B63C › B63C 11/00[m] › Equipo para permanecer o trabajar bajo el agua; Medios para buscar objetos sumergidos (composiciones químicas para utilizarlas en aparatos de respiración A62D 9/00; accesorios o equipos para la natación A63B 31/00 - A63B 35/00; submarinos B63G 8/00).
Notas[t] desde B60 hasta B66: TRANSPORTES O MANUTENCION
B63C 11/02 · Equipos de buceadores.
B63C 11/04 · · Ropas elásticas.
B63C 11/06 · · · con casco rígido.
B63C 11/08 · · · Control de la presión del aire en el interior de la ropa, p. ej. para el control de la flotabilidad.
B63C 11/10 · · Ropas rígidas.
B63C 11/12 · · Máscaras de buceo.
B63C 11/14 · · · con alimentación de aire forzada.
B63C 11/16 · · · con alimentación de aire por aspiración del buceador, p. ej. snorkels.
B63C 11/18 · · Suministro de aire (para máscaras de buceo B63C 11/14, B63C 11/16; aparatos respiratorios en general A62B).
B63C 11/20 · · · a partir de la superficie del agua.
B63C 11/22 · · · llevada por el buceador.
B63C 11/24 · · · · en circuito cerrado.
B63C 11/26 · · Medios de comunicación (comunicación eléctrica en sí H04).
B63C 11/28 · · Calentamiento, p.ej. de trajes de buzo, del aire de respiración.
B63C 11/30 · · Lastrado.
B63C 11/32 · · Dispositivos de descompresión; Equipo de ejercicio.
B63C 11/34 · Cámaras de buceo unidas mecánicamente a una base, p. ej. mediante un cable (manipuladores B25J; cámaras de buceo que no están unidas mecánicamente a una base B63G 8/00; cajones adaptados para la colocación de fundaciones E02D 23/00 - E02D 27/00).
B63C 11/36 · · de tipo cerrado.
B63C 11/38 · · · con entrada situada por encima de la superficie del agua.
B63C 11/40 · · · adaptadas a un trabajo especial.
B63C 11/42 · · · con control independiente de propulsión y de dirección.
B63C 11/44 · · de tipo abierto, p. ej. campanas de buceo.
B63C 11/46 · Artefactos automotores de buceo o similares, es decir, artefactos conducidos por un hombre vestido de buceador.
B63C 11/48 · Medios para buscar objetos sumergidos (medios para señalizar el emplazamiento de objetos hundidos B63C 7/26; aparatos de sondeo sónico G01S).
B63C 11/49 · · Estructuras flotantes con dispositivos para ver bajo el agua, p. ej. con ventanillas.
B63C 11/50 · · utilizando garfios.
B63C 11/52 · Herramientas o utillaje especialmente adaptado para trabajos bajo el agua, no previstos en otro lugar.
CIP2021: Invenciones publicadas en esta sección.
SISTEMA DE AJUSTE DE MOTORES PARA VEHÍCULOS SUBMARINOS DE OPERACIÓN REMOTA PARA APROVECHAMIENTO DE EMPUJE DE MOTORES.
(16/07/2020). Solicitante/s: UNIVERSIDAD SIMÓN BOLIVAR. Inventor/es: ABRIL HOWARD,Omar Santiago, VILLAREAL GONZALEZ,Reynaldo Farid, PESTANA NOBLES,Juan Pablo, OCHOA PERTUZ,Carlos Andres, RODRIGUEZ,Eugenio Yime.
La presente invención pertenece al campo de buques u otras embarcaciones flotantes, sus equipos y medios de localización o recuperación de objetos sumergidos; específicamente relacionado con un equipo para permanecer bajo el agua, los medios para buscar objetos sumergidos con cámaras de buceo unidas mecánicamente a una base de tipo cerrado con control independiente de propulsión y de dirección que consiste en un submarino tipo Vehículo Operado Remotamente (ROV - Remote Operated Vehicle) con seis motores: cuatro motores con empuje en el eje horizontal y dos motores con empuje el eje vertical; donde los motores de empuje horizontal cuentan giran sobre un eje en un ángulo de 0 a 45 grados y donde los motores están ubicados en una estructura adicional que permite el giro y bloqueo de los motores según el ecosistema o las condiciones ambientales a las cuales el Vehículo Operado Remotamente va a ser expuesto).
SISTEMA DE RECUPERACIÓN ROBÓTICA DE FONDO DE ESPACIO ACUÁTICO CON NANOPARTICULAS DE OXIGENO.
(12/12/2019). Solicitante/s: MIRANDA AGÜERO, Manuel. Inventor/es: MIRANDA AGÜERO,Manuel.
La presente invención se relaciona con un conjunto de recuperación robótica de fondo de espacio acuático mediante nanopartículas de oxígeno, que comprende al menos un vehículo acuático tripulado, al menos un sistema de bombeo hidráulico, al menos una unidad compresora de gas, al menos un generador de nano-burbuja, una pluralidad de mangueras hidráulicas y al menos una manguera de gas comprimido, donde dicho conjunto comprende además al menos dos tanques, al menos un sistema de bombeo hidráulico reciprocante y al menos un vehículo operado remotamente o ROV (Remotely Operated Vehicle) sumergido en el espacio acuático, y que comprende una pluralidad de hélices y orugas, y tiene flotabilidad neutra.
DISPOSITIVO ROBOTICO SUMERGIBLE PARA CAPTURA DE IMAGEN.
(04/10/2018). Solicitante/s: FUNDACION UNIVERSIDAD DE BOGOTA JORGE TADEO LOZANO. Inventor/es: VASQUEZ MIRANDA,Leonardo, ALVAREZ ROMERO,Fernando Alberto, PULIDO MARIN,Alexander.
Se relaciona la presente invención con el ramo de la ingeniería mecánica, particularmente con un dispositivo robótico sumergible que se desplaza sobre cables de acero, que registra de manera autónoma imágenes y video del relieve marino optimizando el trabajo de los biólogos marinos ya que controla el desplazamiento, utilizando cámaras que controlan el enfoque, desplazamiento, estabilidad y permiten una captura en secuencia de todo el trayecto lo mismo que la grabación de video. Disminuye la cantidad de buzos, el tiempo requerido en la inmersión y el riesgo existente al hacer el registro, por lo tanto, ahorra costos, mejora la calidad del material recopilado, optimizando el procedimiento.
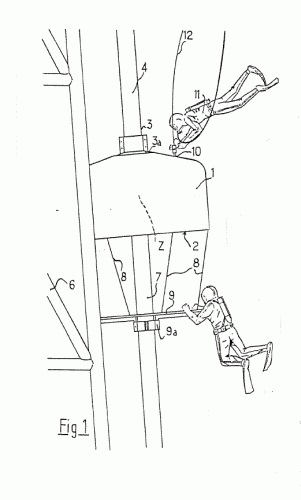
Equipo autónomo de buceo con umbilical.
(03/11/2015) 1. Equipo autónomo de buceo con umbilical con suministro de aire de superficie que contiene un elemento flotante estanco que hace la vez de flotador, depósito de aire comprimido y recipiente , donde se instalan los mecanismos, sirviendo de reservorio de aire, su base está cerrada abombada y plana, sirviendo de suelo donde se fijan compresor , batería , presostato , filtro de aire y todo el elemento queda cerrado por una tapa donde se instala el interruptor, la conexión de carga de la batería, el ventilador de refrigeración , la toma de admisión del compresor y salida de aire de refrigeración, caracterizada por ser de doble capa con conductos que permiten el flujo de aire y dificultan la entrada de agua. Al depósito de acumulación de aire va conectado un tubo que suministra aire a presión al regulador…
Robot submarino humanoide transformable.
(26/08/2015) Robot submarino humanoide transformable.
La presente invención trata de un robot humanoide transformable en un vehículo submarino operado remotamente o "ROV". La transformación se sucede desde una configuración humanoide en la cual el robot inclina el tronco hacia adelante y flexiona las patas , manteniendo erguida la cabeza , de manera que la maniobra culmina en un postura en la que el robot se agacha, mientras que las siguiente fases implican la flexión completa del torso coordinada esta acción con la flexión de los brazos , mientras la cabeza continúa erguida. El proceso opuesto de transformación es igualmente posible en el orden inverso.
VEHÍCULO SUMERGIBLE CON CONTROL DE FLOTABILIDAD Y SISTEMA DE CONTROL DE FLOTABILIDAD DE UN VEHÍCULO SUMERGIBLE MOTORIZADO.
(03/12/2012) Vehículo sumergible motorizado con control de flotabilidad y sistema de control de flotabilidad de un vehículo sumergible motorizado.
El vehículo comprende un sistema de control de flotabilidad que incluye unos tanques (5s1, 5s2, 5i1, 5i2) en conexión con unos dispositivos valvulares (Ve1, Ve2, Vs1, Vs2, Vw1, Vw2) para rellenarlos/vaciarlos de aire/agua de manera regulable, y que es un sistema automático con unos medios de detección de la fuerza, debida al peso, que unos medios de rodadura del vehículo sumergible (V) realizan contra un lecho fluvial (S), y con un sistema electrónico con acceso a los valores de fuerza detectados, conectado con los dispositivos valvulares (Ve1, Ve2, Vs1, Vs2, Vw1, Vw2) y previsto para controlarlos en función de los valores de fuerza detectados.
El sistema de control de flotabilidad…
PLATAFORMA DE FONDO SUBMARINO CONFIGURABLE PARA MEDICIONES DIVERSAS, CON OPCIÓN DE CONTROL REMOTO, Y MODOS CAUTIVO O LIBRE.
(25/01/2012) Plataforma de fondo submarino configurable para mediciones diversas, con opción de control remoto, y modos cautivo o libre, consistente en una base estructural de 3 tubos curvados en "L"-fijados a 120º a una placa central- que acaban en planchas deslizantes o ruedas motrices. Su envolvente es prismático-triangular. Lleva adaptada una pértiga (y/u otros dispositivos) con reflector de infrarrojos (medición con Estación Total) o DGPS-RTK.
Deslizándola sobre fondo sedimentario -por arrastre (cautivo) o autopropulsión (control remoto, por cable o radiofrecuencia)- y midiendo la posición del extremo visible, a intervalos, se describen perfiles.
Compite con…
SISTEMA COMBINADO PARA EL REGISTRO Y LA CONSERVACION ARQUEOLOGICA SUBACUATICA IN SITU.
(01/10/2005) Sistema combinado para el registro y la conservación arqueológica subacuática in situ. Permite el registro documental en objetos arqueológicos subacuáticos y garantiza su posterior conservación en el contexto del yacimiento submarino. Consta de las siguientes fases: - Desconcreción puntual y controlada de zonas de interés documental en objetos arqueológicos subacuáticos de origen metálico. - Registro tridimensional de las zonas limpias mediante moldes flexibles de silicona. -Recubrimiento protector mediante aplicación de resinas epoxídicas formuladas para su aplicación bajo agua y de efecto anticorrosivo. - Verificación…
UTILIZACION TERAPEUTICA DE UNA MEZCLA DE HELIO/OXIGENO, EN PARTICULAR EN EL TRATAMIENTO DEL ASMA.
(01/03/2003). Solicitante/s: AIR LIQUIDE SANTE (INTERNATIONAL). Inventor/es: LECOURT, LAURENT.
Mezcla gaseosa lista para su empleo constituida por el 63,1 al 69,9 % en volumen de helio y siendo el resto oxígeno, estando acondicionada dicha mezcla gaseosa a una presión superior a 2 bares.
(16/07/1992). Solicitante/s: ADERN SABALL, MARCOS.
ESCAFRANDA SALVAVIDAS, DEL TIPO CONSTITUIDO POR UN TRAJE Y UNA CARCASA TRANSPARENTE PARA LA CABEZA, SE CARACTERIZA ESENCIALMENTE PORQUE EL TRAJE COMPRENDE EN UNA SOLA PIEZA, ADEMAS DEL CUERPO Y LOS PANTALONES , UNOS GUANTES Y UN CALZADO , INCORPORANDO EN EL CUELLO DE LA PRENDA UN ANILLO DE ASIENTO PARA LA CARCASA DE LA CABEZA, ESTABLECIENDO UN CONJUNTO HERMETIC RESPECTO AL EXTERIOR; HABIENDOSE PREVISTO EN LA REFERIDA ZONA DEL CUELLO, POR DEBAJO DE LA CARCASA DE LA CABEZA, UN FLOTADOR QUE ES PREFERENTEMENTE ANULAR, CON LA PARTICULARIDAD DE QUE EN LA PARTE SUPERIOR DE LA CARCASA PARA LA CABEZA, SE HA DISPUESTO UN CONDUCTO QUE REMATA EN DOS O MAS RAMIFICACIONES ARQUEADAS DE BOCA DESCENDENTE, EN CADA UNO DE CUYOS EXTREMOS SE DISPONE UN FLOTADOR ESFERICO COMBINADO EN EL CORRESPONDIENTE ASIENTO PARA CONSTITUIR RESPECTIVAS VALVULAS DE CIERRE AUTOMATICO, ESTANDO DICHO CONDUCTO CUBIERTO POR UNA CAPERUZA CON ABERTURAS EN SU BASE.
PROCEDIMIENTO Y CAMARA SUBMARINA PARA REALIZAR TRABAJOS EN UNA ATMOSFERA DE GAS SOBRE ELEMENTOS DE FORMA ALARGADA.
(01/05/1979). Ver ilustración. Solicitante/s: COMPAGNIE MARITIME D'EXPERTISES S.A.
Procedimiento y cámara submarina para realizar trabajos en una atmósfera de gas sobre elementos en forma alargada tal como trabajos de soldadura, procedimiento caracterizado porque comprende las siguientes operaciones: se rodea la zona sobre la que debe efectuarse la soldadura, por la cámara flexible replegada del lado de los mencionados elementos y se realiza la estanquidad a nivel del cuello de ésta alrededor de al menos uno de los elementos; se engancha a la parte inferior de la cámara los cables de retención para evitar el efecto de boya debido a la insuflación del gas; y se insufla en la cámara una mezcla de gas y se expulsa el agua hasta que la cámara se despliegue y adopte la forma de una bolsa abierta en su parte inferior.
APARATO Y METODO PARA LA RECUPERACION DESDE UNA NAVE POSATUBOS DE CONDUCTOS TUBULARES COLOCADOS EN FONDOS MARINOS PROFUNDOS.
(16/02/1978). Solicitante/s: SAIPEM S.P.A..
Aparato para la recuperación, desde una nave posatubos, de conductos tubulares colocados en fondos marinos profundos, caracterizado porque está constituido por un robusto armazón de doble cruceta que es sostenido por su parte inferior, a través de una anilla, por un cable de sostén vinculado a un chigre de la nave posatubos, y que está provisto en su parte inferior de una pinza de agarre y elevación del conducto tubular, constituida por pares de mandíbulas accionables hidráulicamente, así como de medios para cortar el eventual tramo averiado del conducto tubular que deba recuperarse, estando dicho armazón también provisto, en uno de sus lados, de medios para guiarlo sobre el conducto tubular que deba recuperarse y, en el otro de sus lados, de medios para soportar de forma amovible, hacer girar y desplazar axialmente.
{kind=link}