Sistema de navegación de campo próximo.
Sistema de navegación de campo próximo que comprende un primer objeto y un segundo objeto,
navegando el primer objeto en relación con el segundo objeto,
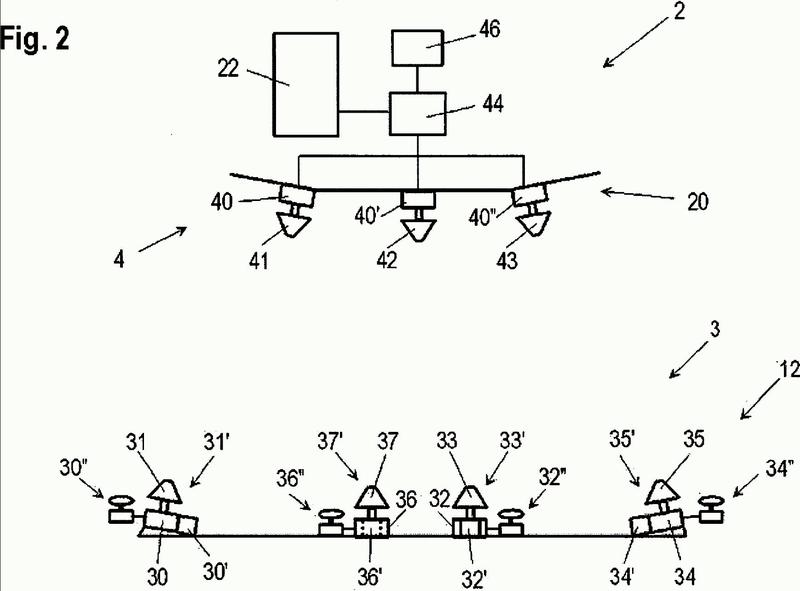
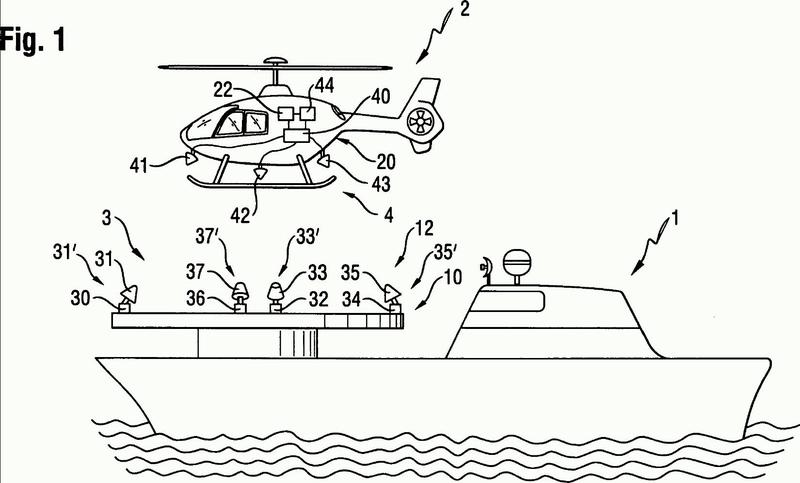
- comprendiendo dicho primer objeto en movimiento un segmento de usuario (4) de dicho sistema de navegación de campo próximo que tiene más de un receptor (40, 40', 40"), más de una antena de usuario (41, 42, 43) montada en una estructura de usuario (20) de dicho primer objeto, y una unidad de procesamiento (44) conectada a dichos receptores (40, 40', 40"), en el que cada antena de usuario (41, 42, 43) está conectada a un receptor asociado (40, 40', 40");
- comprendiendo dicho segundo objeto un segmento de base (3) de dicho sistema de navegación de campo próximo que tiene al menos cuatro transmisores (30, 32, 34, 36) y al menos cuatro antenas de base (31, 33, 35, 37), en el que cada transmisor está conectado a una antena de base correspondiente y respectiva de dichas antenas de base (31, 33, 35, 37) y en el que las antenas de base (31, 33, 35, 37) están previstas en una estructura de base (12) de dicho segundo objeto y están posicionadas una respecto a otra a distancias conocidas;
- en el que dicho segmento de base (3) está dotado de al menos una unidad de detección de posición, en el que dicho segmento de base (3) está previsto en dicho segundo objeto que es un vehículo móvil o en movimiento, preferiblemente un buque militar (1);
- en el que dichos receptores (40, 40', 40") y cada uno de dichos transmisores (30, 32, 34, 36) forman en conjunto unidades de medición de distancia;
- en el que la unidad de procesamiento (44) está adaptada para calcular los datos de posición tridimensional relativa de la estructura de usuario (20) con respecto a la estructura de base (12) basándose en datos de distancia obtenidos de dichas unidades de medición de distancia, en el que la unidad de procesamiento (44) está adaptada para utilizar también datos obtenidos de dicha al menos una unidad de detección de posición para calcular los datos de posición tridimensional absoluta y/o relativa de la estructura de usuario con respecto a la estructura de base;
- en el que al menos un primer transmisor de dichos transmisores (30; 32; 34; 36) está dotado de una unidad de medición de distancia entre transmisores (30'; 32'; 34'; 36') que está adaptada para determinar la distancia entre la antena (31) de dicho primer transmisor (30) y la antena de al menos otro transmisor (32, 34, 36) de dicho segmento de base (3);
- en el que dicho al menos primer transmisor de dichos transmisores (30; 32; 34; 36) está adaptado para transmitir los datos de distancia entre transmisores determinados a dichos receptores (40, 40', 40") de dicho segmento de usuario (4),
- en el que dicho segmento de base (3) comprende una unidad de control de medición de distancia entre transmisores (38) que controla la(s) unidad(es) de medición de distancia entre transmisores (30', 32', 34', 36'); y
- en el que dicha unidad de control (38) está prevista en uno de dichos transmisores (30', 32', 34', 36') que así forma un transmisor maestro (30) adaptado para transmitir los datos de distancia entre transmisores determinados a dichos receptores (40, 40', 40") de dicho segmento de usuario (4) formando así un segmento de base autónomo (3) con una capacidad de autocalibración;
- en el que el sistema de navegación de campo próximo está configurado para determinar, utilizando dos de dichas antenas de usuario, un rumbo, o, utilizando tres de dichas antenas de usuario, una actitud de dicho primer objeto en relación con dichos transmisores basándose en la medición de distancia.
Tipo: Patente Europea. Resumen de patente/invención. Número de Solicitud: E11004758.
Solicitante: Airbus Defence and Space GmbH.
Nacionalidad solicitante: Alemania.
Dirección: Willy-Messerschmitt-Straße 1 82024 Taufkirchen ALEMANIA.
Inventor/es: OEHLER,VEIT, Voith von Voithenberg,Michael, STEFFES,JULIAN.
Fecha de Publicación: .
Clasificación Internacional de Patentes:
- G01S5/02 FISICA. › G01 METROLOGIA; ENSAYOS. › G01S LOCALIZACION DE LA DIRECCION POR RADIO; RADIONAVEGACION; DETERMINACION DE LA DISTANCIA O DE LA VELOCIDAD MEDIANTE EL USO DE ONDAS DE RADIO; LOCALIZACION O DETECCION DE PRESENCIA MEDIANTE EL USO DE LA REFLEXION O RERRADIACION DE ONDAS DE RADIO; DISPOSICIONES ANALOGAS QUE UTILIZAN OTRAS ONDAS. › G01S 5/00 Establecimiento de la posición mediante la coordinación de dos o más determinaciones de dirección o de líneas de posición; Establecimiento de la posición mediante la coordinación de dos o más determinaciones de distancia. › usando ondas de radio (G01S 19/00 tiene prioridad).
- G01S5/14 G01S 5/00 […] › Por determinación de distancias absolutas a una pluralidad de puntos espaciados de emplazamiento conocido.
- G01S5/16 G01S 5/00 […] › que utilizan ondas electromagnéticas que no sean ondas de radio.
PDF original: ES-2688233_T3.pdf
Patentes similares o relacionadas:
 Aparato automáticamente desplazable y procedimiento de guiado de tal aparato para dirigirlo a un punto de destino, del 29 de Julio de 2020, de VORWERK & CO. INTERHOLDING GMBH: Aparato automáticamente desplazable , especialmente aparato de limpieza para limpiar un suelo , tal como un robot de aspiración y/o barrido, con uno o […]
Aparato automáticamente desplazable y procedimiento de guiado de tal aparato para dirigirlo a un punto de destino, del 29 de Julio de 2020, de VORWERK & CO. INTERHOLDING GMBH: Aparato automáticamente desplazable , especialmente aparato de limpieza para limpiar un suelo , tal como un robot de aspiración y/o barrido, con uno o […]
Sistema de detección de localización de fuente de luz, del 6 de Mayo de 2020, de Thales Defense & Security, Inc: Un sistema para rastrear una orientación de un primer objeto , comprendiendo el sistema: un dispositivo de emisión de luz situado con respecto […]
Procedimiento y dispositivo para determinar la distancia entre un receptor aéreo y un emisor terrestre fijo, del 19 de Junio de 2019, de MBDA FRANCE: Procedimiento para la determinación continua de la distancia entre un receptor aéreo (R) móvil de manera conocida en una trayectoria conocida (T) y un […]
SISTEMA INFO-OPTICO PARA LA MONITORIZACIÓN DEL MOVIMIENTO DE ROEDORES DE LABORATORIO, del 10 de Enero de 2019, de UNIVERSIDAD DE MURCIA: Sistema info-óptico para la monitorización del movimiento de roedores de laboratorio. La presente invención consiste en un sistema info-óptico diseñado […]
SISTEMA DE POSICIONAMIENTO, del 10 de Enero de 2019, de IBAÑEZ CRUZ, Javier: Especialmente concebido para espacios cubiertos de grandes dimensiones, está constituido a partir de una serie de módulos espaciales estáticos convenientemente […]
 Medición óptica de hilo aéreo, del 27 de Septiembre de 2018, de JRB ENGINEERING PTY LTD: Método de medición óptica de una ubicación de uno o más objetos (W1-W6) que comprende:
obtener datos (22b) de imagen estereoscópica para el […]
Medición óptica de hilo aéreo, del 27 de Septiembre de 2018, de JRB ENGINEERING PTY LTD: Método de medición óptica de una ubicación de uno o más objetos (W1-W6) que comprende:
obtener datos (22b) de imagen estereoscópica para el […]
SISTEMA INTERIOR DE LOCALIZACION EN ENTORNOS METÁLICOS., del 27 de Junio de 2018, de SKYLIFE ENGINEERING, S.L: Sistema interior de localización en entornos metálicos basado en un sistema de posicionamiento destinado a entornos donde la recepción de señales […]
 SISTEMA DE CÁLCULO DE POSICIONES INDICATIVAS, CONTROLADOR PARA UN SISTEMA DE CÁLCULO DE POSICIONES INDICATIVAS, SISTEMA DE JUEGOS Y MÉTODO DE CÁLCULO DE POSICIONES INDICATIVAS, del 21 de Enero de 2011, de NAMCO BANDAI GAMES INC.
ZEROPLUS TECHNOLOGY CO., LTD.
SHANG HWANG INDUSTRY CO., LTD.
KUMABAYASHI, TATSUJI: Un sistema de cálculo de posiciones indicativas que calcula una posición indicativa de un controlador , comprendiendo dicho sistema de cálculo de posiciones […]
SISTEMA DE CÁLCULO DE POSICIONES INDICATIVAS, CONTROLADOR PARA UN SISTEMA DE CÁLCULO DE POSICIONES INDICATIVAS, SISTEMA DE JUEGOS Y MÉTODO DE CÁLCULO DE POSICIONES INDICATIVAS, del 21 de Enero de 2011, de NAMCO BANDAI GAMES INC.
ZEROPLUS TECHNOLOGY CO., LTD.
SHANG HWANG INDUSTRY CO., LTD.
KUMABAYASHI, TATSUJI: Un sistema de cálculo de posiciones indicativas que calcula una posición indicativa de un controlador , comprendiendo dicho sistema de cálculo de posiciones […]